 Aktualności
Aktualności
Różnica między RTK i ppk.
UAV . są szeroko stosowane, z niskim kosztem, wielokrotnym zadaniem, dobrą zwrotnością, wysoką wydajnością i niskimi promieniowaniem. . są szeroko stosowane we wszystkich aspektach wojskowych i cywilnych produkcji.
Ponieważ . GPS ma charakterystykę całej pogody, precyzyjna precyzyjna i automatyczne pomiary, UAV Obecnie używany do badania i mapowania zasadniczo używają GPS do pozycjonowania i nawigacji. GPS jednokunkt dokładność pozycjonowania UAV . kontrola lotówjest zbyt kiepski. Wcześniej duża liczba punktów kontroli obrazu była używana do poprawienia obrazu zniekształcenia
Jednak w niektórych specjalnych terenach (takie jak góry, doliny, rzeki itp.), Trudno jest personelowi w terenie wdrażania kontroli obrazu punkty. W celu zmniejszenia obciążenia, większość punktów kontroli obrazu nie jest nawet potrzebna, i konieczne jest poprawa dokładności pozycjonowania samolotu, RTK Technologia technologii i PPK może osiągnąć poziom centymetrów Dokładność.
Poniżej zaczynamy od dwóch zasad technicznych RTK oraz PPK i przeprowadzić analizę porównawczą, aby znaleźć bardziej odpowiednią metodę powietrza GPS pozycjonowanie.
1. . . Zasada pracy RTK

RTK . (W czasie rzeczywistym ruch) System pomiarowy zwykle zawiera trzy części: Odbiór GPS.Sprzęt, system transmisji danych i system oprogramowania do dynamicznego pomiaru. The RTK Technologia pomiarowa opiera się na obserwacji fazy nośnej i ma szybką i wysoką precyzję Pozycjonowanie Funkcja. Technologia pomiaru różnicowoznawstwa fazy nośnej może uzyskać trójwymiarową pozycjonowanie w czasie rzeczywistym stacji pomiarowej w określonym układzie współrzędnych i ma poziom centymetru pozycjonowanie dokładność.
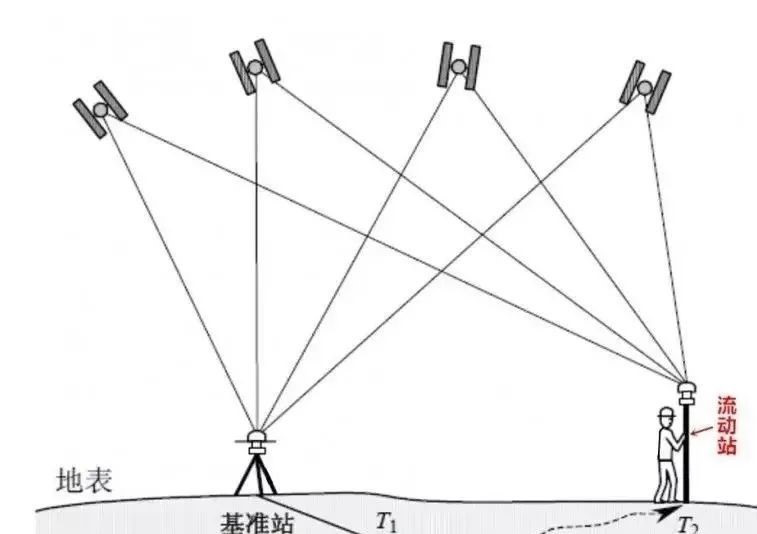
Zasada pracy RTK .Pomiar to: Umieść jeden odbiornik na stacji bazowej i umieść inny odbiornik na przewoźniku (zwany Mobile stacja). Stacja bazowa i stacja mobilna jednocześnie odbierają sygnały wysyłane przez tego samego GPS satelita. Uzyskana wartość obserwacyjna jest porównywana ze znanymi informacjami o pozycji, aby uzyskać korektę różnicową GPS wartość. Następnie wartość korekty jest wysyłana na stację mobilną publiczną satelitę Via Radio Data Link Station w czasie, aby udoskonalić wartość obserwacji GPS, aby uzyskać dokładniejszą pozycję w czasie rzeczywistym stacji ruchomej po różnicowej korekcji.
Obecnie dokładność płaszczyzny pozycjonującej głównego nurtu producenta RTK może sięgać 8 mm + . 1ppm, a dokładność elewacji może sięgać 15 mm + . 1ppm. Istnieją dwie główne metody komunikacji między stacją bazową a telefonami komórkowymi Stacja radiowa i sieć. Sygnał stacji radiowej jest stabilny, a odległość transmisji sygnału sieciowego jest długa, a każdy ma własne zalety.
Po drugie, praca pracująca PPK
Zasada robocza PPK (Przetwarzanie po przetwarzaniu Kinematyka, dynamiczna GPS POST-przetwarzanie Różnica) Technologia jest używanie odbiorników stacji bazowej do jednoczesnej obserwacji, a co najmniej jeden odbiornik mobilny do jednoczesnej obserwacji GPS satelity. Innymi słowy, stacja bazowa pozostaje ciągła. Po obserwacji inicjalizacji Rover porusza się do następnego punktu, który ma być określony i konieczne jest utrzymanie ciągłego śledzenia satelity podczas Przeniesienie do przeniesienia niejednoznaczności satelity. cały tydzień do zaplanowanego czas.
Dane otrzymane przez stację referencyjną i ROVER w tym samym czasie są liniowo połączone w komputerze, tworząc wartość obserwacji fazy wirtualnej nośnej, aby określić względną pozycję między odbiornikami. Wreszcie wprowadzono znane współrzędne stacji referencyjnej w celu uzyskania trójwymiarowych współrzędnych ROVER.
Technologia PPK jest najwcześniejszą dynamiczną technologią różnicową GPS (również znany jako pół dynamiczny sposób, quasi-dynamiczny względna metoda pozycjonowania, stop-and-go metoda). Główna różnica między nim a RTK Technologia polega na tym, że ustanawia transmisję danych w czasie rzeczywistym na bazowych stacjach i stacjach Rover ( takich jak RTK), ale po obserwacji pozycjonowania dane pozycjonujące zebrane przez dwa odbiorniki GPS będą wspólnie przetworzone po pomiarze, aby obliczyć współrzędną Pozycja stacji mobilnej w odpowiednim czasie. Rover nie jest ściśle ograniczony. Jego zaletami są wysoką dokładność pozycjonowania, wysoka wydajność pracy, duży promień roboczy i łatwa obsługa
3. . . Porównanie RTK i ppk.
Podobieństwa między RTK i ppk.
1. . . Tryb pracy jest taki sam. Oba technologie używają trybu pracy stacji referencyjnej Plus ROVER.
2. . . Oba technologie należy zainicjować przed operacją.
3. . . Oba mogą sięgać poziom centymetru Dokładność.
Różnica między RTK i ppk.
1. . . Różna komunikacja Metody. RTK . Technologia wymaga stacji radiowej lub sieci do przesyłania danych różnicowych Technologia PPK nie wymaga wsparcia technologii komunikacyjnej i może nagrywać statyczne dane.
2. . . Różne pozycjonowanie Metody. Technologia pozycjonowania w czasie rzeczywistym używana przez RTK Umożliwia przeglądanie współrzędnych i dokładności punktu pomiarowego na ROVER w dowolnym czasie; Pozycjonowanie PPK to przetwarzanie po przetwarzaniu pozycjonowanie i współrzędne punktu nie mogą być widzianym na stronie potrzebuje po przetwarzaniu Aby zobaczyć wyniki
3. . . Promień roboczy jest inny. RTK . Operacja jest ograniczona przez Stacja komunikacji. Odległość operacyjna zazwyczaj nie przekracza 10 km. Tryb sieci potrzebuje obszaru objętego siecią sygnał. Korzystając z technologii PPK, ogólny promień operacyjny może osiągnąć 50 km.
4. . Stopień wpływu sygnałów satelitarnych jest inny. W procesie RTK Operacja, jeśli znajduje się w pobliżu przeszkody, takiej jak duże drzewo, łatwo jest stracić zamek; Podczas pracy PPK zwykle nie jest łatwo stracić zamek po inicjalizacji.
5. . Różne pozycjonowanie Dokładność. RTK . Dokładność samolotu 8mm + . 1 ppm, dokładność elewacji 15mm + . 1ppm . Dokładność płaszczyzny PPK 2,5 mm + . 0,5 ppm, dokładność elewacji 5mm + . 0,5 ppm.
6. . Różne pozycjonowanie częstotliwości. Częstotliwość, na której RTK Stacja bazowa wysyła dane różnicowe, a odbiera stację mobilną jest na ogół 1-2 Hz, a maksymalna częstotliwość pozycjonowania PPK może osiągnąć 50 Hz.
porównawcze Analiza:
1. . . Latająca prędkość dronów w powietrzu jest bardzo szybka i wymaga wysokiej pozycji częstotliwość. Nawigacja w czasie rzeczywistym RTK Technologia jest trudna do osiągnięcia tego stanu. PPK obsługuje 50 Hz częstotliwość pozycjonowania, która może w pełni spełnić popyt.
2. . . RTK . Zapewnia lokalizację w czasie rzeczywistym informacje. PPK może rozwiązać dane epoki w okresie przetwarzania Nie tylko może zwiększyć stałość, ale dokładność rozdzielczości jest wyższa.
3. . . RTK . Wymaga radia lub modułu komunikacyjnego sieciowego, ale PPK nie, co może zmniejszyć obciążenie dronów i przedłużyć żywotność lotu
4. . Odległość jazdy RTK .jest ograniczony, a odległość jazdy PPK może osiągnąć 50 km. W obszarach pracy na duże odległości i na dużą skalę, zwłaszcza obszary taśmowe, takie jak linie transmisyjne, drogi, koleje, rurociągi naftowe i gazowe, PPK będzie najlepszym wyborem.
Cztery, podsumowując
Chociaż . RTK . może zapewnić wysoką precyzję Informacje o lokalizacji W czasie rzeczywistym istnieją obecnie świetne trudności techniczne w aplikacji UAV Największa zaleta ppk.ponad RTK jest to, że może być przetwarzany po fakcie, i może być odwrócony filtrowanie (Reverse Kalman Filtr), co może rozwiązać problem niektórych satelitów tracących blokadę i poprawić dokładność pozycjonowania przez fuzję i Odwróć.
Technologia PPK to pozycjonowanie przestrzenne technologia. Wraz z rozwojem technologii jest bardziej odpowiedni do instalacji na Dronie. UAV . Technologia staje się coraz bardziej dojrzała. Operacje na dużą skalę są bardziej wydajne niż Tradycyjne RTK Pomiary. Technologia PPK ma oczywiście szerokie perspektywy rozwoju w dziedzinie dronów. Technologia PPK z pewnością stanie się kręgosłupem dronów w badaniach i mapowaniu.
Wellhope . Produkcja bezprzewodowa z siedzibą w 5g 4g; MIMO; GNSS antena dronowa ; GSM; 3G; WLAN; LTE Antena i Pigtail RF Kabel; Więcej pytań lub zapytania, abyś nas wysłał e-mail; wh@wellhope-wireless.com.